
Problem
Given a set of input texts, how to map them to a motion sequence?
Observations
- Autoregressive motion generation accumulates errors.
- HumanML dataset offers vague descriptions of motions for individual body parts.
- HumanML dataset offers vague descriptions of time-varied motions.
Assumptions
- Probabilistic mapping from text to motion leads to diversity of generations.
- Text descriptions can be decomposed into subparts of body-part-independent control signals.
- Text descriptions can be decomposed into subparts of time-independent control signals.
- Body-part-independent and time-independent control signals independently condition motion generation.
Pipeline
Basis Model
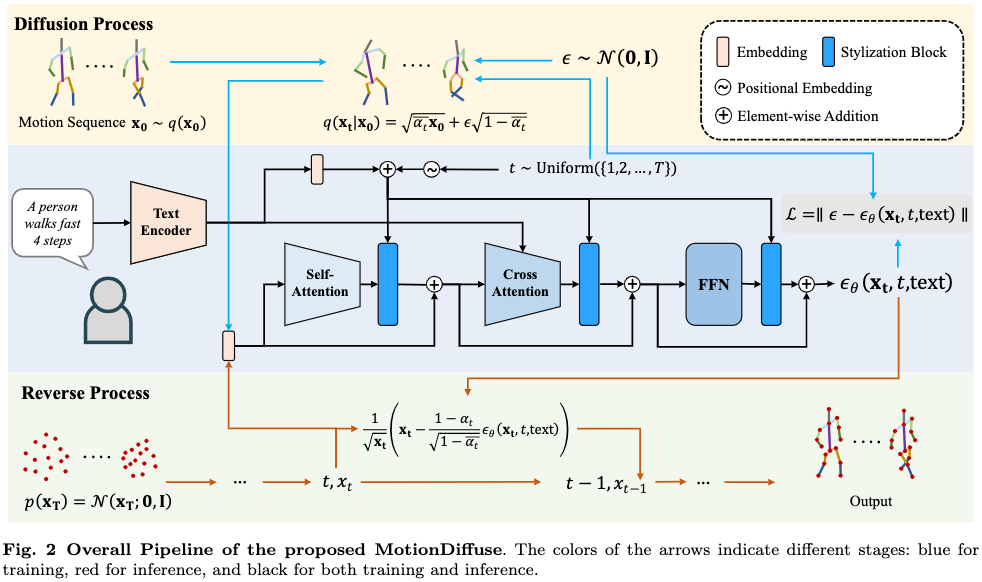
A DDPM is employed as the basis model to map a normal distribution to motion distribution, conditioned by text descriptions.
This model is characterized by a forward diffusion process and a backward denoising process.
Diffusion Process (Forward)
By definition, a diffusion process iteratively diffuses a motion distribution \(q(\mathbf{x}_0)\) until it becomes a normal distribution:
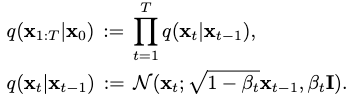
Here \(\beta_t\) is a constant hyperparameter scheduling the variance rate. This is a simplification from learned variance schedules.
Instead of iteratively diffusing the motion distribution as illustrated above, the following distribution is mapped to each diffusion step directly from the motion distribution:

where

Denoising Process (Backward)
By definition, a denoising process eliminates noise from a normal distribution \(p_\theta(\mathbf{x}_T)\) until it becomes close to the motion distribution, whose approximation is \(p_\theta(\mathbf{x_{0:T}})\):
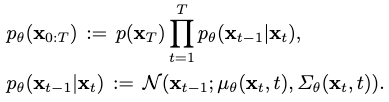
In the denoising process, the eliminated noise term \(\epsilon_\theta(\mathbf{x}_t,t, \text{text})\) is predicted instead of \(\mathbf{x}_{t-1}\).
This noise term is predicted by an optimized neural network, s.t. it approximates \(\epsilon\) in each diffusion with a minimum MSE. The total loss for the denoising process is therefore:

According to the original setup, we need to compute both \(\mu_\theta\) and \(\Sigma_\theta\) from \(\epsilon_\theta\) in order to perform denoising. The problem is simplified by only considering \(\mu_\theta\) and keeping \(\Sigma_\theta=\beta_t\):

Modules
Text Encoder
A classical transformer is employed to represent text as embeddings.
The text tokens are passed through several layers of self-attention blocks with residual connections. The first several layers are initialized with parameter weights from CLIP and kept frozen.
The embeddings are then passed through an FFN head containing three linear layers and two GELU activations.
Linear Self-attention
A linear efficient self-attention layer is used to extract better motion features during diffusion steps, by capturing correlation between motion frames.
Why Efficient Attention?
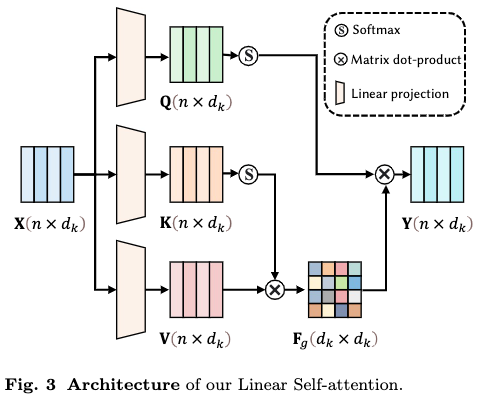
A global feature map \(\mathbf{F}_g\) is computed instead of pairwise attention weights.
Time complexity is reduced from \(O(n^2d)\) to \(O(d^2_knk)\), where \(n\) is the sequence length, \(k\) the number of heads, and \(d_k\) the dimension of feature for one head.
\(\mathbf{F}_g\) captures global information of the motion, while classical attention focuses on pairwise relations. The former captures features that are more semantically meaningful for describing the entire motion.
Linear Cross-attention
A linear efficient cross-attention block is used to correlate motion with text conditions. The text embeddings are injected as \(\mathbf{X}\) for the \(\mathbf{K}\) matrix.
Stylization Block
This module is added after each other module in the DDPM to allow conditioning by diffusion step stamp \(t\), s.t. each other module obtains information about the current diffusion process.
The stamping is formulated by adding a positional embedding \(\mathbf{e}_t\) to the text embeddings \(\mathbf{e}_\text{text}\), forming \(\mathbf{e}\). Given output \(\mathbf{Y}\) from another module, it’s updated by the stylization block as:

where \((\cdot)\) is a Hadamard product, and \(\phi\), \(\psi\) are linear projections.
Essentially, this block serves as a soft activation of extracted features w.r.t. diffusion step \(t\). The text feature \(\mathbf{e}_\text{text}\) is included because we need to consider different activation patterns for different text embeddings.
Extensions
Body Part-independent Controlling
The lack of diversity in given text descriptions makes accurate body part motion control difficult.
The expected motion is significantly far away from training distribution, when it comes to prompts describing accurate body part motions.
A naive solution is to separate motion generation for different body parts. However, this approach loses correlation between different parts. For example, “legs running” and “hands waving” should have similar frequencies for a generated motion.
Noise Interpolation Scheme
MotionDiffuse enforces a correlated body part-independent controlling by interpolating the predicted noise from body parts.
Given \(n\) text descriptions \(\{\text{text}_i\}\) for different body parts \(\{s_i\}\), we want to compute noise term \(\epsilon^{\text{part}}=\{\epsilon_j^\text{joint}\}, j \in [1,m]\) s.t. each body part can be controlled independently by a noise.
\(j\) is a subscript to indicate which actual body partition the joint belongs to, and \(m\) is the total number of actual body partitions. \(m \leq n\) since an actual body partition can have a one-to-many relationship with described body parts.
Recall that we already have a global denoising direction \(\epsilon_i=\epsilon_\theta(\mathbf{x}_t,t,\text{text}_i)\), for each body part description. Suppose \(\epsilon_i\in\mathbb{R}^{F \times D}\), where \(F\) is the number of frames and \(D\) the number of joints.
The problem is how to map \(\epsilon_i\) to \(\epsilon^{\text{part}}\).
An intuitive way is to filter out the noise of any partition that doesn’t belong to the currently described part:
\[\epsilon^\text{part}=\sum^m_{i=1}\epsilon^\text{part}_i \cdot \mathbf{M}_i.\]Here \(\mathbf{M} \in \{0,1\}^D\) is a binary vector that indicates this selection, and \((\cdot)\) is the Hadamard product.
The complete ignoring of partitions leads to combination difficulty. Therefore, a smoothing term is added to interpolate the global noise:

where \(\nabla\) is the gradient and \(\lambda_1\) is a hyperparameter to balance the smoothness.
Time-varied Controlling
A time-varied controlling scheme is proposed to extend the model’s ability for continuous generation of long-term, different actions.
Given an array of \(\{\text{text}_{i,j}\}, i \in [1,m]\) where \(m\) is the number of intervals, we first estimate \(\epsilon^\text{time}_i\) for each interval independently w.r.t. the given durations. Each noise is then padded with zero to extend to the same total motion length.
An interpolation similar to the body part-independent controlling scheme then follows:

where \(\lambda_2\) is another hyperparameter to control smoothing.
Comments